Uno studio in vitro sull'accuratezza dei moduli modulari utilizzati per guidare completamente gli impianti in combinazione con la riduzione ossea per restauri di arcate complete: Esperti contro studenti
Traduzione automatica
L'articolo originale è scritto in lingua EN (link per leggerlo) .
Obiettivi: Questo studio in vitro valuta l'accuratezza dei moduli chirurgici modulari utilizzati per guidare completamente gli impianti in combinazione con la riduzione ossea, eseguita da esperti e studenti, per restauri di arcate complete.
Metodi: Tutte le procedure sono state eseguite da studenti di odontoiatria dell'ultimo anno e da un clinico esperto, su dodici modelli di mandibola edentula. È stata effettuata una pianificazione virtuale degli impianti, simulando un restauro di arcata completa su sei impianti. Sono state progettate e stampate tre diverse guide chirurgiche per consentire il posizionamento convenzionale completamente guidato degli impianti (gruppo 1); il posizionamento completamente guidato degli impianti con guide modulari (gruppo 2); e il posizionamento completamente guidato degli impianti dopo la riduzione ossea, con guide modulari simili (gruppo 3). Dopo il posizionamento degli impianti, sono state effettuate scansioni ottiche dei modelli di studio. La deviazione superficiale e l'accuratezza sono state valutate e confrontate tra gruppi e sottogruppi.
Risultati: Sono stati utilizzati un totale di 12 moduli chirurgici. Di questi, due moduli in ciascun gruppo sono stati utilizzati da due studenti diversi, mentre gli altri sei moduli sono stati utilizzati da un clinico esperto come segue: un modulo con perni di ancoraggio avvitati e uno con perni di ancoraggio spinti in ciascun gruppo. Sono stati posizionati un totale di 72 impianti. È stata trovata una differenza statisticamente significativa tra i diversi design dei moduli, quando gli impianti sono stati posizionati da un clinico esperto. Non è stata trovata alcuna differenza statisticamente significativa tra esperti e studenti, tranne che per la deviazione in un valore angolare (studenti 2.13±1.46° contro esperto 0.90±0.9°; P Value=0.0447) nel gruppo 3. È stata trovata una differenza statisticamente significativa a favore dei perni di ancoraggio avvitati, nel gruppo 1, nella deviazione orizzontale (perni avvitati 0.18±0.13 mm contro perni spinti 0.56±0.28 mm; P Value=0.0124; Tabella 5). Non è stata trovata alcuna differenza statisticamente significativa tra i diversi design dei moduli quando gli impianti completamente guidati sono stati posizionati da studenti, sia in angolo che orizzontalmente (P=0.2787 e P=0.6601, rispettivamente). È stata trovata una differenza statisticamente significativa tra i gruppi quando gli impianti sono stati posizionati da un clinico esperto, con un valore migliore utilizzando perni di ancoraggio avvitati, nel piano orizzontale (P= 0.0293) ma non in angolo (P= 0.3380).
Conclusioni: I modelli modulari offrono un livello di precisione simile a quello delle guide convenzionali a pezzo unico. Dovrebbero essere utilizzati perni avvitati per fissare la parte base delle guide modulari. Sono necessari ulteriori studi clinici per confermare questi risultati preliminari.
Significato Clinico: Le guide chirurgiche modulari offrono una precisione comparabile a quella delle guide convenzionali a pezzo unico, tuttavia offrono maggiori possibilità, aiutando nella riduzione ossea e nelle procedure di carico immediato. I perni di ancoraggio avvitati utilizzati per fissare la parte base delle guide modulari forniscono risultati finali migliori rispetto ai perni spinti.
Introduzione
Il posizionamento degli impianti guidato digitalmente e pianificato protesicamente è diventato un metodo prevedibile per il posizionamento degli impianti e il carico immediato. Seguendo un flusso di lavoro accurato, ci si aspetta che la precisione degli impianti completamente guidati sia strettamente allineata al piano virtuale proposto. Questo consente un'alta precisione chirurgica e riduce al minimo il tempo chirurgico, così come le regolazioni in studio di una protesi provvisoria. La precisione di un template chirurgico viene valutata misurando la deviazione tridimensionale (3D) degli impianti posizionati rispetto alle posizioni pianificate virtualmente. La precisione finale dell'intero processo può essere influenzata da diversi fattori, inclusi, ma non limitati a, condizioni cliniche, software utilizzato, tipo e precisione della fabbricazione del template, anche in relazione al design della guida e alle tecnologie/materiali di stampa 3D.
Negli ultimi anni, in particolare nelle restaurazioni di arcate complete, la tendenza a posizionare impianti è passata da impianti ritardati in osso guarito, a impianti immediati post-estrattivi. La riduzione ossea e il posizionamento dell'impianto possono essere realizzati nella stessa procedura chirurgica, minimizzando il trauma e la necessità di due interventi separati. Tuttavia, nei pazienti con una linea del sorriso alta nell'arcata superiore, o in caso di cresta ossea irregolare o sottile, si raccomanda la riduzione ossea per ridurre le complicazioni biologiche e tecniche correlate alle protesi supportate da impianto.
Per oltre 10 anni, sono stati pubblicati diversi manoscritti che propongono flussi di lavoro completamente digitali per il trattamento della dentizione compromessa, utilizzando template chirurgici a doppio o di diversi tipi multi-pezzo. I cosiddetti multi-pezzo (o impilabili, o modulari), hanno mostrato risultati clinici promettenti quando utilizzati da clinici esperti. I template chirurgici modulari possono migliorare la fiducia in caso di riduzione ossea, impianti post-estrattivi e carico immediato. Tuttavia, il livello di evidenza è basso e incoerente, e manca ancora di dati generalizzabili su quale sia il miglior design di tali template chirurgici multi-pezzo. Inoltre, c'è anche incoerenza nella nomenclatura utilizzata nella letteratura disponibile. Il termine "modulare" è utilizzato in questo documento e si riferisce a template che consistono in pochi pezzi che forniscono diverse caratteristiche (moduli).
L'obiettivo di questo studio comparativo in-vitro è valutare l'accuratezza dei modelli chirurgici modulari utilizzati per guidare completamente gli impianti in combinazione con la riduzione ossea, eseguita da clinici esperti e studenti. La presente ricerca è stata redatta secondo le linee guida CRIS (Checklist for Reporting In-vitro Studies).
Materiali e metodi
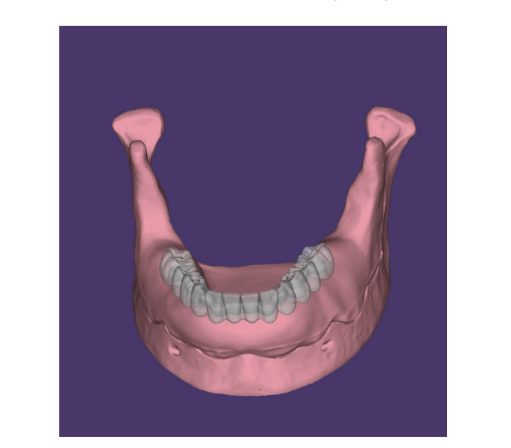
Questo studio è stato progettato come ricerca comparativa in-vitro. Due studenti di odontoiatria dell'ultimo anno (FP e ADM) e un clinico esperto con oltre 15 anni di esperienza in chirurgia guidata (MT) hanno eseguito tutte le procedure. Sono stati utilizzati dodici modelli di mandibola edentula completi e identici con gengiva, dedicati per esercizi di implantologia, con una corticale densa e spessa e un osso trabecolare interno che rappresenta una consistenza D2 (Dentalstore & Edizioni Lucisano SRL, Milano, Italia), per tutti gli esperimenti. È stata eseguita una scansione con tomografia computerizzata a fascio conico (Cranex 3Dx, Soredex, Tuusula, Finlandia) (90 KV, 5.0 mA, FOV 6 × 8, risoluzione 0.2 mm) e i file DICOM sono stati abbinati ai file STL derivati dalla scansione ottica dello stesso modello (i700, Medit Corp., Yeongdeungpo-gu, Seoul, Corea del Sud).
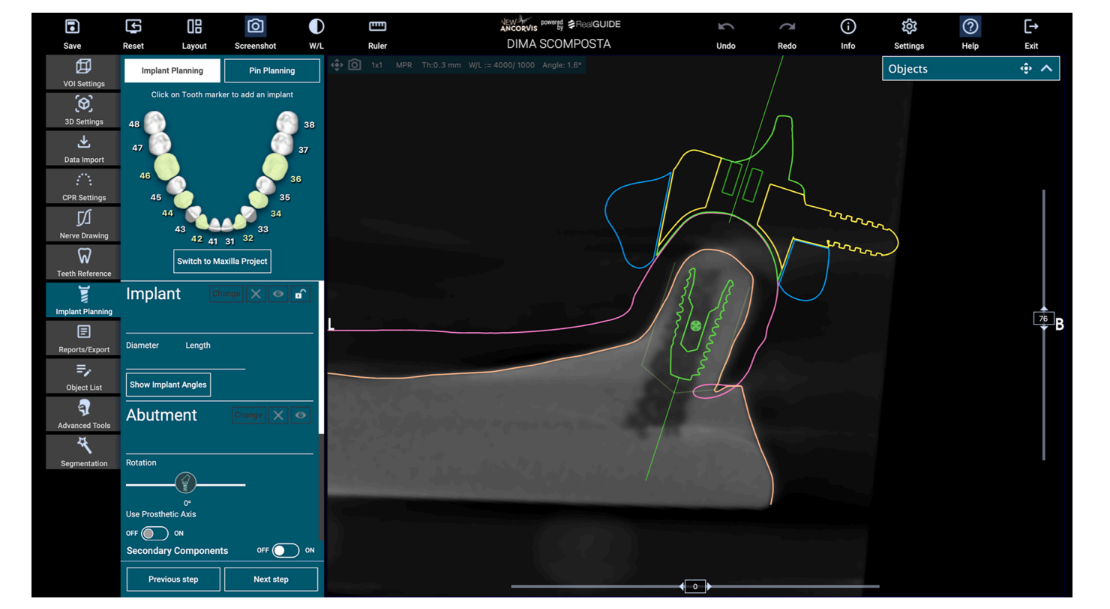
È stata eseguita una simulazione virtuale per pianificare prosteticamente gli impianti virtuali (Exoplan 3.1 prototipo di Rijeka, Exocad GmbH, Darmstadt, Germania, Fig. 1). Successivamente, sei impianti Osstem TSIII (Osstem Implants, Seoul, Corea del Sud), di 4 mm di diametro e 10 mm di lunghezza, sono stati pianificati virtualmente utilizzando un software certificato medico (RealGUIDE 5.1 3DIEMME, Cantù, Italia) (Figs. 1 e 2). Gli impianti sono stati pianificati nelle posizioni degli incisivi laterali, dei primi premolari e dei primi molari, circa quattro millimetri sotto la cresta ossea per consentire una riduzione della cresta ossea. Gli impianti sono stati posizionati abbastanza perpendicolari al piano occlusale, con una discrepanza di 6° (incisivi laterali), 4,5° (premolari) e 0° (molari). Inoltre, sono stati pianificati tre perni di ancoraggio in posizione buccale per fissare e stabilizzare la guida chirurgica.
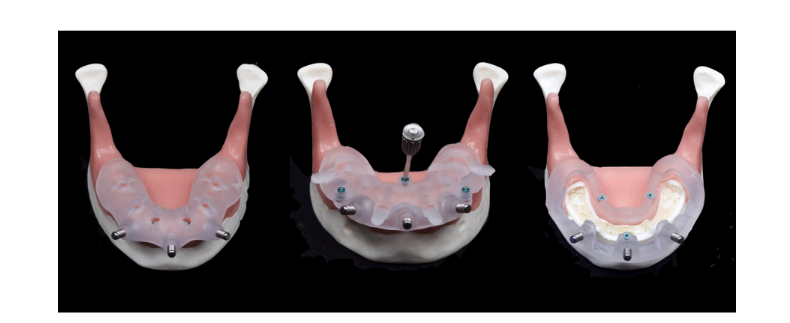
Dopo che la pianificazione virtuale dell'impianto è stata completata e infine approvata da un secondo clinico esperto (LZ), le guide chirurgiche sono state preparate secondo il protocollo della presente ricerca con tre diversi design come segue (gruppi 1 a 3). È stato utilizzato un template monopezzo nel gruppo 1 e template chirurgici multipli nei gruppi 2 e 3 (guide modulari). In particolare, nel gruppo 1 (o gruppo di controllo), è stato utilizzato un template chirurgico monopezzo convenzionale. Nel gruppo 2 (o gruppo di guide modulari senza riduzione ossea), è stato utilizzato un template chirurgico modulare. Infine, è stata progettata una guida modulare simile ma non identica per essere utilizzata nel gruppo 3, in combinazione con una riduzione ossea verticale pre-pianificata di 4 mm (gruppo di guide modulari e riduzione ossea). La parte base di tutte le guide modulari include le maniche per i perni di ancoraggio e le fessure per altri moduli: il modulo impianto che include le maniche (stampate) per la preparazione dei siti implantari e per guidare completamente gli impianti; e il modulo indice, utilizzato per fissare e stabilizzare la parte base nella posizione corretta, prima della fissazione dei perni di ancoraggio. Tuttavia, la parte indice non è stata utilizzata per questo test in-vitro a causa dell'assenza di denti e dell'arcata antagonista. Il modulo base e il modulo impianto sono stati collegati utilizzando tre mini-viti metalliche (New Ancorvis SRL, Bologna, Italia) (Fig. 3).
In ogni gruppo, sono stati utilizzati quattro modelli identici. Due modelli sono stati utilizzati da due studenti diversi (uno ciascuno), mentre gli altri due modelli sono stati utilizzati da un clinico esperto: un modello con perni di ancoraggio avvitati e uno con perni di ancoraggio spinti. Tutti i modelli chirurgici sono stati progettati per guidare completamente sei impianti e stabilizzati con tre perni di ancoraggio. Secondo il kit chirurgico utilizzato (OneGuide Kit, Osstem Implants, Seoul, Corea del Sud) non sono state utilizzate maniche metalliche e i modelli sono stati completamente stampati in 3D. Tutti i modelli chirurgici sono stati stampati in un centro di fresatura professionale (New Ancorvis SRL, Bologna, Italia) utilizzando una stampante DMP Dental 100 e un materiale in resina certificato (VisiJet M2R-CL 3D Systems Inc., Rock Hill, Carolina del Sud, USA). In ogni gruppo, tre dei quattro modelli sono stati progettati per consentire il posizionamento di perni di ancoraggio avvitati, mentre l'ultimo modello è stato progettato per consentire il posizionamento di perni di ancoraggio spinti. Un totale di 72 impianti fittizi sono stati completamente guidati e posizionati, 24 fittizi per gruppo. Un riepilogo dei modelli utilizzati è presentato nella Tabella 1. Tutti gli impianti sono stati posizionati secondo le istruzioni dei produttori. Il protocollo di perforazione è stato lo stesso per tutti i campioni, tranne per l'uso aggiuntivo di un mucotomo nei gruppi 1 e 2. Prima di iniziare la ricerca, gli studenti sono stati formati partecipando a un corso teorico/pratico di 3 giorni (su modelli) sulla chirurgia guidata.

- Nel gruppo 1, il template chirurgico convenzionale e monopezzo è stato fissato utilizzando tre perni di ancoraggio avvitati. Successivamente, è stata eseguita l'installazione degli impianti completamente guidata e senza lembo, secondo il protocollo di perforazione suggerito dal produttore, con una coppia di inserimento compresa tra 30 e 40 Ncm.
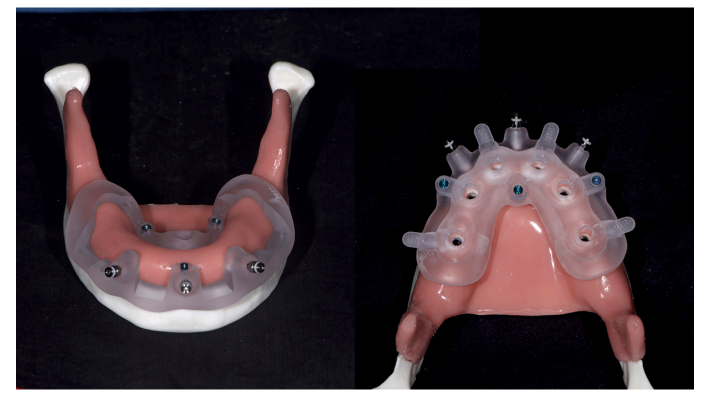
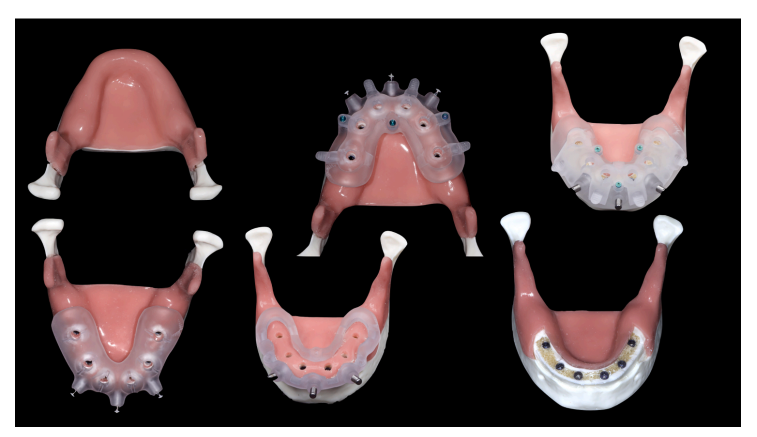
- Nel gruppo 2 (Fig. 4), la parte di base del template chirurgico è stata fissata utilizzando tre perni di ancoraggio avvitati. Dopo di che, il modulo dell'impianto è stato collegato utilizzando tre mini viti metalliche (New Ancorvis SRL, Bologna, Italia). Infine, sei impianti sono stati posizionati senza lembo e completamente guidati, come descritto in precedenza.
- Nel gruppo 3 (Fig. 5), è stato progettato un lembo prima della stabilizzazione del template. La gengiva è stata parzialmente rimossa dal modello. Dopo di che, la base del template chirurgico modulare è stata fissata utilizzando tre perni di ancoraggio avvitati. La riduzione ossea è stata eseguita a fianco del paziente, utilizzando una punta ultrasonica dedicata per la chirurgia ossea con una profondità di taglio di 9 mm (BS1 s, per Piezotome Solo Ultrasonic Bone Surgery, ACTEON Germany GmbH, Düsseldorf, Germania), sotto irrigazione salina. La parte di base del template chirurgico modulare è stata progettata per guidare la punta ultrasonica durante la riduzione ossea iniziale. Dopo di che, la riduzione ossea è stata completata a mano libera. Infine, il modulo dell'impianto è stato collegato utilizzando tre mini viti metalliche e gli impianti sono stati completamente guidati come descritto in precedenza.
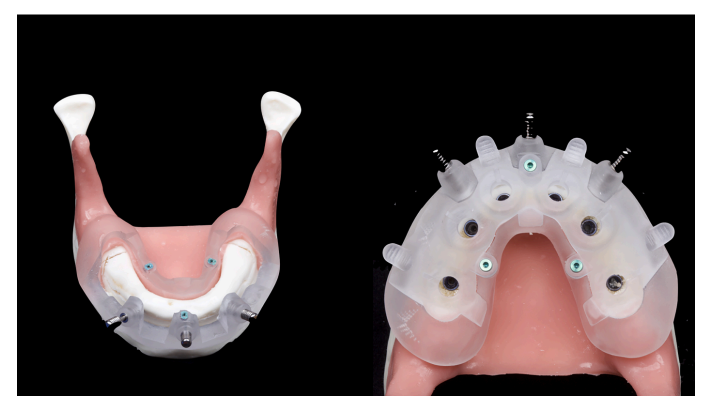
Dopo il posizionamento degli impianti (Fig. 6), in tutti i gruppi, sono stati collegati gli abutment per scansione digitale (Osstem Implant, Seoul, Corea del Sud) agli impianti e sono state effettuate scansioni ottiche intraorali (Medit i700, Medit corp., Seoul, Corea del Sud, Fig. 7). Lo scanner è stato calibrato secondo le linee guida del produttore prima di ogni procedura.

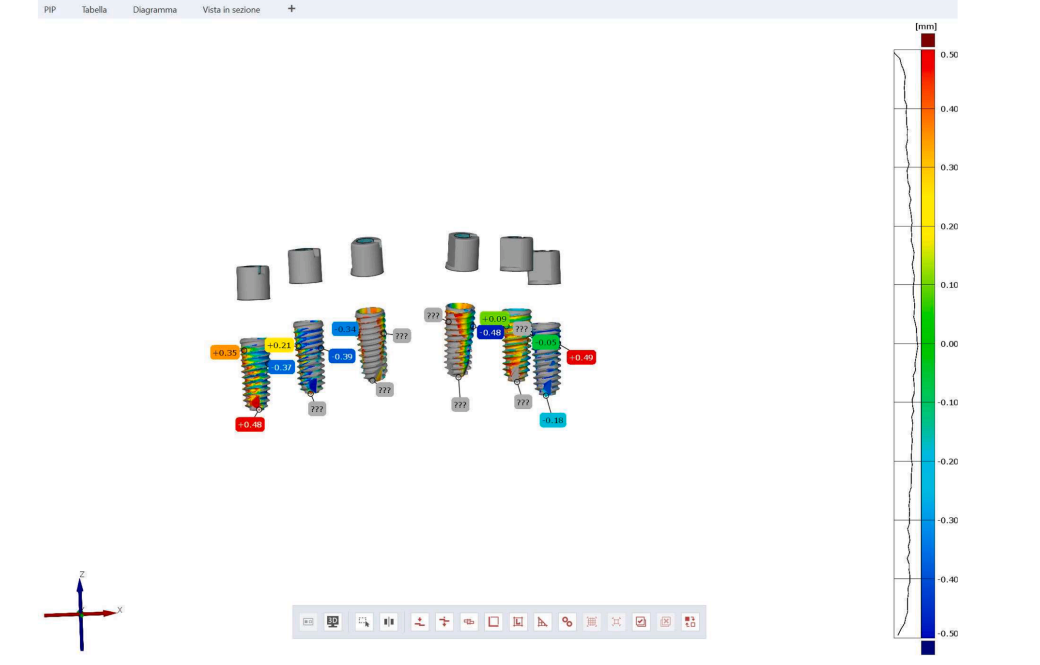
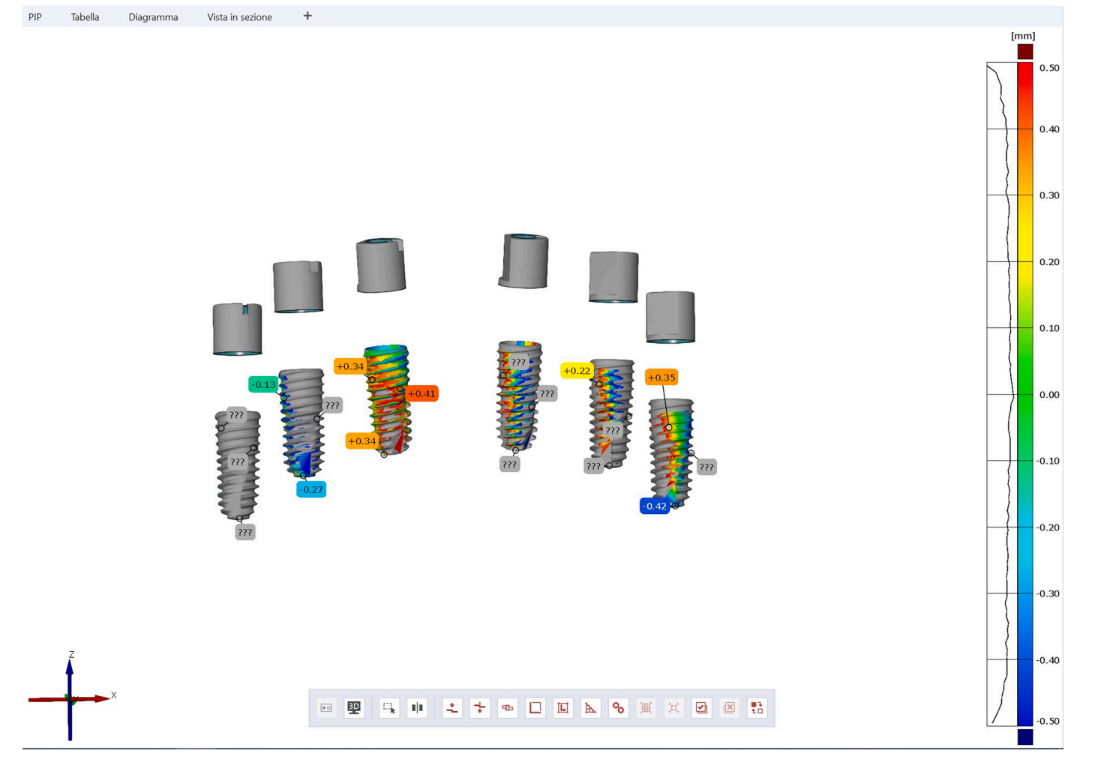
Le misure di esito erano la deviazione della superficie e l'accuratezza, stabilite misurando (Optical RevEng 4.0, Open Technologies, Rezzato (BS), Italia) la differenza tra la posizione degli abutment digitalizzati (STL postoperatorio, file Standard Triangle Language), abbinata al file STL originale, derivato dal piano implantare virtuale, utilizzato come riferimento. I modelli di riferimento e quelli digitalizzati sono stati sovrapposti e registrati, e i valori di deviazione tra le due superfici sono stati calcolati come confronto della superficie (orizzontale e angolo), mentre l'accuratezza è stata valutata come la combinazione di verità e precisione.
Un tecnico dentale esperto e in cieco ha eseguito tutte le misurazioni. Un valutatore indipendente, non precedentemente coinvolto nello studio, ha eseguito tutte le misurazioni.
Le analisi statistiche sono state eseguite utilizzando NUMBERS, versione 11.2 (Apple Inc., Cupertino, CA, USA) e calcolatori online (calcolatore ANOVA, https://www.statskingdom.com/180Anova1way.html). Sono stati calcolati i valori medi e la deviazione standard (SD). I confronti tra i gruppi per risultati continui (studenti contro esperti e perni avvitati contro perni spinti) sono stati effettuati tramite test non appaiati, al fine di rilevare eventuali cambiamenti nell'accuratezza. È stata condotta un'analisi della varianza unidirezionale (ANOVA) per determinare l'effetto dei diversi design delle guide sull'accuratezza finale. Un clinico indipendente, non precedentemente coinvolto nello studio e con esperienza in statistica medica, ha eseguito tutte le analisi.
Risultati
Un totale di 12 modelli chirurgici sono stati stampati e utilizzati, e un totale di 72 impianti completamente guidati (Dummy fixture, Osstem Implants, Seoul, Corea del Sud) sono stati posizionati secondo le istruzioni dei produttori. L'accuratezza dei modelli chirurgici in ciascun gruppo è stata confrontata in diversi scenari. Tutti i dati sono riassunti nelle Tabelle 2-7.
3.1. Differenze tra gruppi di esperti e studenti
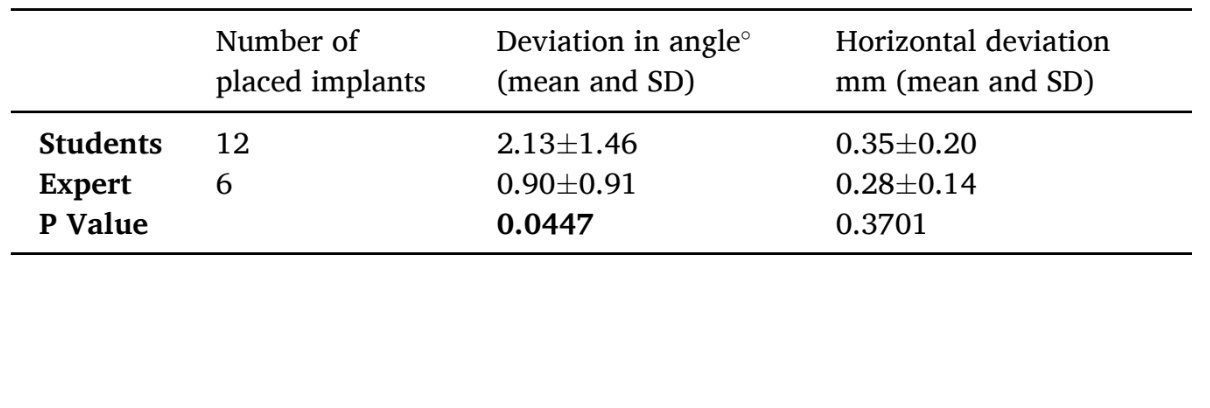
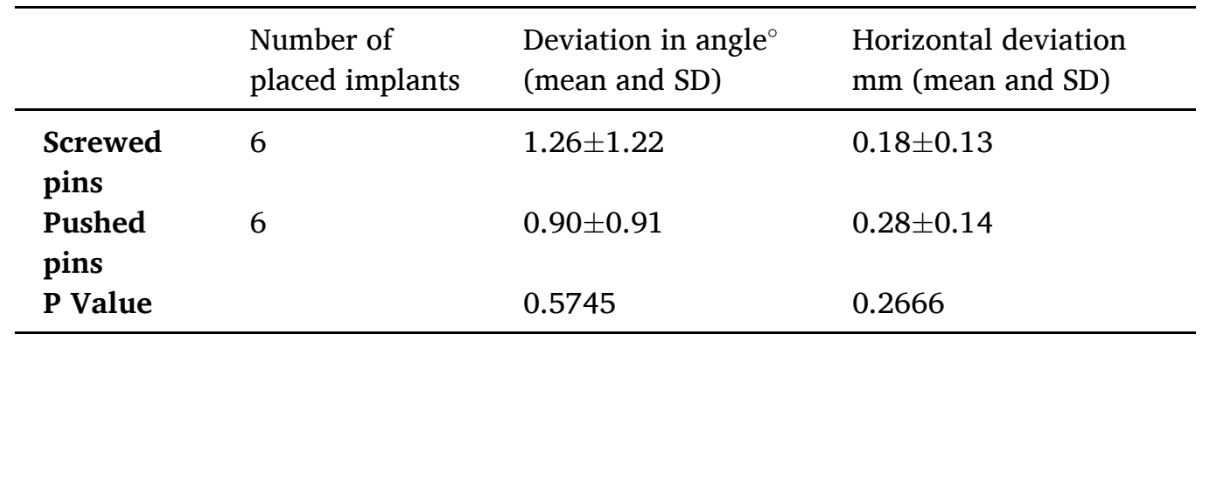
Sebbene ci sia una tendenza a una maggiore accuratezza quando gli impianti sono stati posizionati dal clinico esperto, non è stata trovata alcuna differenza statisticamente significativa tranne che per la deviazione in un valore angolare (studenti 2.13±1.46° contro esperto 0.90±0.91°; P Value=0.0447), riportata nel gruppo 3, quando è stata utilizzata la guida modulare in combinazione con una riduzione ossea (Tabella 4).
3.2. Differenze tra perni avvitati e perni spinti
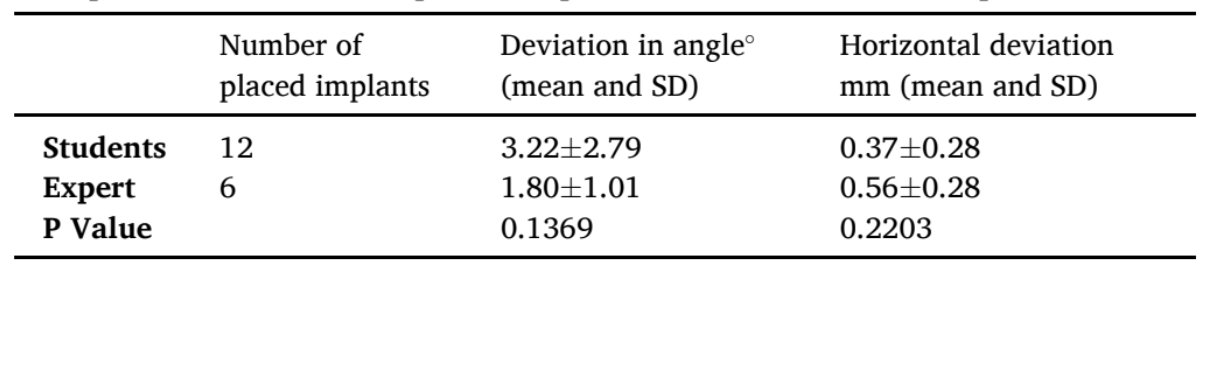
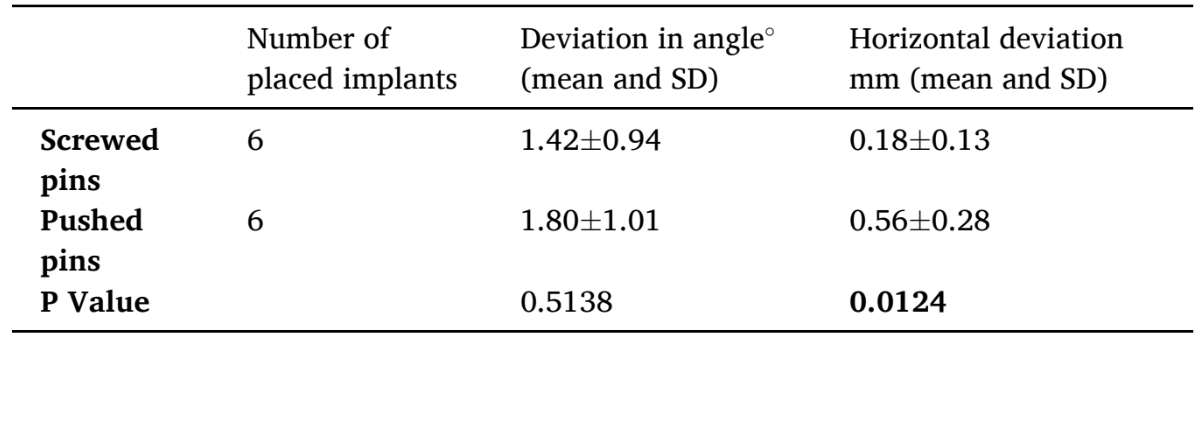
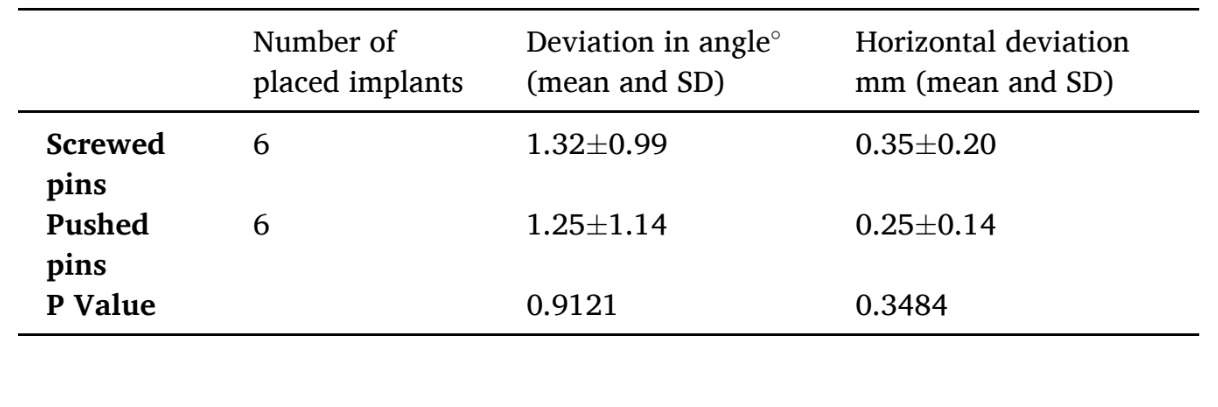
Quando sono stati confrontati i perni avvitati e quelli spinti, è stata trovata una differenza statisticamente significativa a favore dei perni di ancoraggio avvitati, nel gruppo 1, nella deviazione orizzontale (perni avvitati 0.18±0.13 mm contro perni spinti 0.56±0.28 mm; P Value=0.0124; Tabella 5). Nello stesso gruppo, la deviazione in un angolo non è risultata statisticamente significativa, anche se si può suggerire una tendenza a una maggiore precisione per i perni avvitati (1.42° contro 1.80°). Nei gruppi 2 e 3 non sono state trovate differenze statisticamente significative (Tabelle 6 e 7).
3.3. Effetto di diversi design delle guide sulla precisione finale
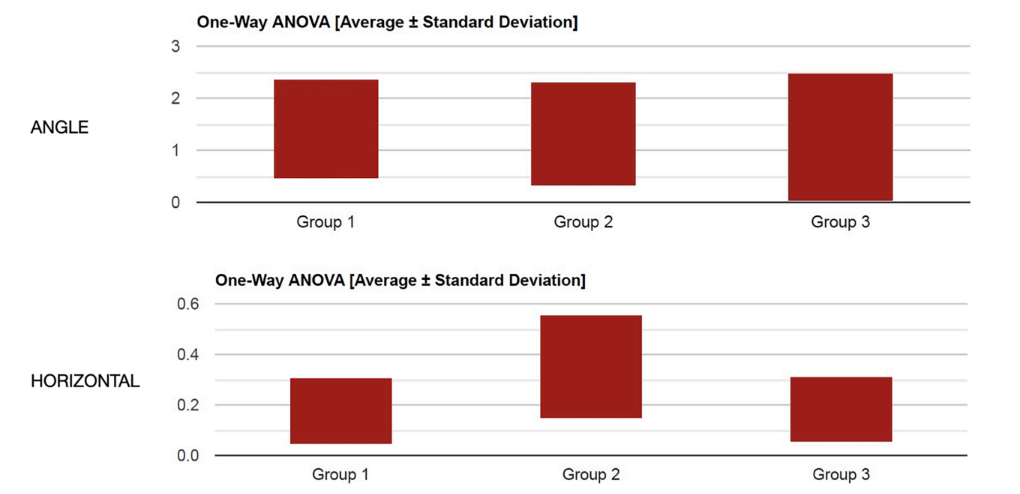
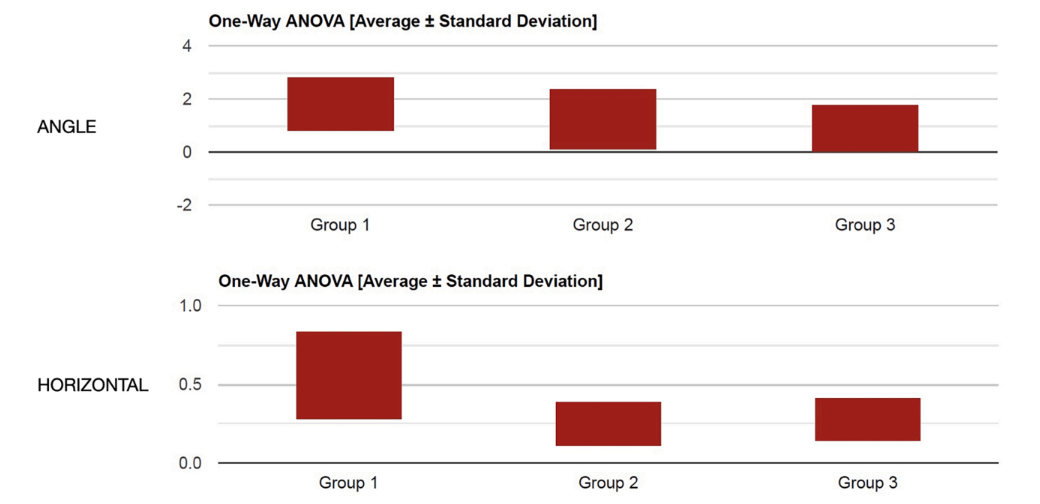
Sebbene la precisione complessiva sia migliorata con la pratica, non è stata trovata alcuna differenza statisticamente significativa tra i diversi design dei template quando gli impianti completamente guidati sono stati posizionati dagli studenti, sia in angolo che orizzontalmente (P = 0.2787 e P = 0.6601, rispettivamente, Fig. 10). Tuttavia, il trattamento più complesso è stato eseguito per ultimo.
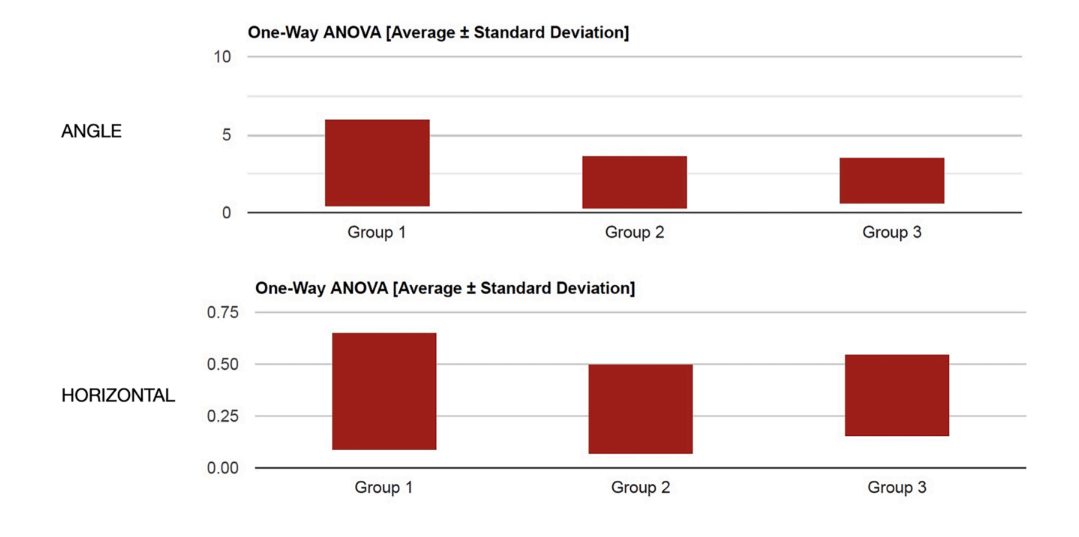
Allo stesso modo, non è stata trovata alcuna differenza statisticamente significativa tra i gruppi quando gli impianti sono stati posizionati da un esperto, utilizzando perni di ancoraggio spinti, sia in angolo che nel piano orizzontale (P = 0.9671 e P = 0.1349, rispettivamente, Fig. 11). Al contrario, è stata trovata una differenza statisticamente significativa tra i gruppi quando gli impianti sono stati posizionati da un clinico esperto, con un valore migliore utilizzando perni di ancoraggio avvitati, nel piano orizzontale (P = 0.0293) ma non in angolo (P = 0.3380, Fig. 12).
Discussione
Questa ricerca in vitro è stata effettuata per valutare l'accuratezza dei moduli chirurgici modulari per il posizionamento completamente guidato degli impianti nelle restaurazioni di arcate complete, con e senza riduzione ossea. I risultati preclinici hanno dimostrato che un'accuratezza simile può essere raggiunta utilizzando guide modulari rispetto ai moduli convenzionali (modulo in un pezzo). Tuttavia, le guide modulari possono offrire ulteriori vantaggi come guida per una riduzione ossea più semplice e pianificata in anticipo, e/o una consegna più rapida e accurata delle protesi temporanee trattenute da viti.
Tutti i modelli chirurgici testati si sono dimostrati sicuri, mostrando un livello di discrepanza tra la posizione pianificata e quella reale degli impianti, all'interno dei margini di errore già suggeriti nella letteratura (circa 1,5–2 mm). La possibile ragione per cui esperti e studenti hanno ottenuto risultati simili è probabilmente dovuta alla natura in-vitro dello studio. Utilizzando un modello chirurgico, il margine di errore dovrebbe essere limitato alla tolleranza delle maniche. Tuttavia, in vivo, ci sono diversi fattori che potrebbero influenzare la precisione finale degli impianti posizionati. Per quest'ultimo, i risultati della presente ricerca preliminare in-vitro dovrebbero essere interpretati con cautela. Tuttavia, la precisione finale delle guide modulari è incoraggiante per la sua applicazione nella pratica quotidiana, principalmente da parte di clinici esperti. Pertanto, i clinici meno esperti dovrebbero iniziare con casi semplici e guide semplici, come aree non estetiche di creste parzialmente edentule. Tale curva di apprendimento consente di padroneggiare la tecnica e il flusso di lavoro digitale nell'odontoiatria implantare. Inoltre, è ben documentato che la precisione è maggiore nel caso di modelli supportati da denti rispetto a guide supportate da mucosa.
Ci sono due dati importanti che devono essere considerati dalla presente ricerca. Il primo risultato è che all'interno degli studenti, l'accuratezza complessiva è migliorata con la pratica. Questo risultato è in accordo con un'altra ricerca in-vitro pubblicata da Cushen e Turkyilmaz, concludendo che il livello di esperienza dell'operatore contribuisce all'accuratezza finale degli impianti posizionati. Sebbene gli studenti abbiano raggiunto risultati soddisfacenti all'interno dei margini di sicurezza fino a 2 mm, è stata riscontrata un'accuratezza statisticamente significativa più alta nella deviazione angolare, nel caso di una guida modulare con riduzione ossea. Inoltre, è stata trovata un'accuratezza più alta caso per caso, dimostrando che operatori più esperti posizionano gli impianti in modo più accurato.
Il secondo dato ha confermato che i clinici esperti possono fornire una tendenza a un livello di accuratezza più elevato, anche nel caso di modelli modulari e riduzione ossea. Nella letteratura, sono state proposte diverse guide chirurgiche e protocolli per eseguire la riduzione ossea prima del posizionamento dell'impianto. Quando necessario, la riduzione ossea è un passo utile per ottenere una larghezza adeguata dell'osso, appiattendo la cresta ossea, e per fornire lo spazio restaurativo richiesto in base alla selezione dei materiali. Utilizzando tecnologie digitali, come nella presente ricerca, la riduzione ossea e il posizionamento dell'impianto possono essere realizzati in modo guidato e nella stessa procedura chirurgica. La pianificazione digitale consente di pianificare in anticipo la quantità di osso da ridurre, guidando il clinico durante l'intervento, minimizzando il trauma e lo stress per il paziente, e rendendo più facile e veloce il carico immediato. Inoltre, dopo la riduzione ossea, la dimensione verticale e la relazione maxillo-mandibolare sono compromesse. Le guide modulari consentono di pianificare in anticipo il restauro provvisorio, rendendo più facili le procedure di carico immediato, inclusa la stabilizzazione della protesi temporanea alla corretta dimensione verticale e occlusione. Tuttavia, una raccolta dati impeccabile, una pianificazione virtuale adeguata, un design e una stampa della guida accurati, così come una corretta esecuzione clinica sono tutti obbligatori per ottenere risultati complessivamente soddisfacenti.
Ultimo ma non meno importante, i perni avvitati hanno dimostrato una maggiore precisione rispetto ai perni spinti. I perni avvitati dovrebbero essere utilizzati quando la parte di base della guida modulare non deve essere rimossa. Al contrario, i perni avvitati possono perdere stabilità quando vengono svitati e poi riavvitati. In tali casi, possono essere scelti i perni spinti.
Guardando ad alcune ulteriori considerazioni, ci sono altri campi di applicazione dei modelli modulari, come gli impianti immediati in pazienti con dentizione compromessa e la consegna della protesi definitiva il giorno dell'intervento. Tuttavia, sono necessari ulteriori studi per convalidare le guide modulari in caso di impianti immediati.
La principale limitazione della presente ricerca è la natura in-vitro che potrebbe sottovalutare alcuni fattori clinici. Poi, la successiva limitazione è che tutti i moduli utilizzati in questo studio erano fissati insieme con mini viti metalliche. Le guide modulari sono già utilizzate nella pratica quotidiana e lo sviluppo delle tecnologie digitali offre nuove possibilità per progettare e produrre elementi di fissaggio, inclusi connettori magnetici, perni conici e altri. Anche se questi risultati sono incoraggianti, c'è ancora bisogno di ulteriori ricerche per confermare questi risultati preliminari e testare tutte le possibilità dei modelli modulari.
Conclusioni
- Con le limitazioni della presente ricerca in-vitro, si possono trarre le seguenti conclusioni:
- I moduli modulari possono essere utilizzati in sicurezza mostrando un livello di accuratezza simile a quello delle guide convenzionali monoblocco.
- Sebbene gli studenti abbiano mostrato un livello di accuratezza inferiore rispetto agli esperti, i valori medi erano all'interno del margine di errore del software.
- Tra gli studenti, l'accuratezza è migliorata con la pratica, evidenziando l'importanza della curva di apprendimento.
- Le viti dovrebbero essere utilizzate per fissare la parte di base nel caso di guide chirurgiche modulari.
Marco Tallarico, Łukasz Zadrożny, Fabio Pia, Anna Di Marzio, Silvio Mario Meloni, Francesco Grande, Santo Catapano, Milena Pisano
Riferimenti
- P.M. Soares, G.D.A. Silveira, L.S. Gonçalves, A. Bacchi, G.K.R. Pereira, Protocolli di manutenzione per protesi dentali supportate da impianti: una revisione esplorativa, J. Prosthet. Dent. (2022).
- I. Darby, Fattori di rischio per la parodontite e la peri-implantite, Periodontol. 2000 90 (1) (2022) 9–12.
- M. Tallarico, M. Czajkowska, M. Cicciù, F. Giardina, A. Minciarelli, Ł. Zadrożny, C. J. Park, S.M. Meloni, Accuratezza dei modelli chirurgici con e senza maniche metalliche nel caso di restauri parziali: una revisione sistematica, J. Dent. 115 (2021) 103852.
- Ł. Zadrożny, M. Czajkowska, M. Tallarico, L. Wagner, J. Markowski, E. Mijiritsky, M. Cicciù, Modelli chirurgici protesici e preparazione del sito implantare: uno studio in vitro, Prosthesis 4 (1) (2022) 25–37.
- S. Chandran, L. Sers, G. Picciocchi, F. Luongo, H. Lerner, M. Engelschalk, S. Omar, Chirurgia implantare guidata con R2Gate®: uno studio clinico retrospettivo multicentrico con 1 anno di follow-up, J. Dent. 127 (2022) 104349.
- S. Li, C. Yi, Z. Yu, A. Wu, Y. Zhang, Y. Lin, Valutazione dell'accuratezza dell'inserimento degli impianti con e senza una guida chirurgica CAD/CAM da parte di neofiti rispetto a specialisti tramite il metodo di registrazione digitale: uno studio crossover randomizzato in vitro, BMC. Oral Health 23 (1) (2023) 426.
- T. Elliott, A. Hamilton, N. Griseto, G.O. Gallucci, Guide chirurgiche per impianti prodotte additivamente: una revisione, J. Prosthodont. 31 (S1) (2022) 38–46.
- F. Luongo, H. Lerner, C. Gesso, A. Sormani, Z. Kalemaj, G. Luongo, Accuratezza nella chirurgia implantare guidata statica: risultati da uno studio clinico retrospettivo multicentrico su 21 pazienti trattati in tre studi privati, J. Dent. 140 (2024) 104795.
- M. Tallarico, D. Galiffi, R. Scrascia, M. Gualandri, Ł. Zadrożny, M. Czajkowska, S. Catapano, F. Grande, E. Baldoni, A.I. Lumbau, S.M. Meloni, M. Pisano, Flusso di lavoro digitale per l'inserimento di impianti guidati protesicamente e montaggio incrociato digitale: una serie di casi retrospettivi, Prosthesis 4 (3) (2022) 353–368.
- J.-Y. Park, Y.W. Song, S.-H. Park, J.-H. Kim, J.-M. Park, J.-S. Lee, Fattori clinici che influenzano il posizionamento degli impianti mediante chirurgia guidata utilizzando un modello senza maniche metalliche nell'arcata parzialmente edentula: analisi di regressione multipla di una coorte prospettica, Clin. Oral Implants Res. 31 (12) (2020) 1187–1198.
- C.R. Hatz, B. Msallem, S. Aghlmandi, P. Brantner, F.M. Thieringer, Può una stampante 3D di livello base creare modelli anatomici di alta qualità? Valutazione dell'accuratezza dei modelli mandibolari stampati da una stampante 3D desktop e un dispositivo professionale, Int. J. Oral Maxillofac. Surg. 49 (1) (2020) 143–148.
- C. Berli, F.M. Thieringer, N. Sharma, J.A. Müller, P. Dedem, J. Fischer, N. Rohr, Confronto delle proprietà meccaniche delle resine pressate, fresate e stampate in 3D per dispositivi occlusali, J. Prosthet. Dent. 124 (6) (2020) 780–786.
- K.C. Oh, J.M. Park, J.S. Shim, J.H. Kim, J.E. Kim, J.H. Kim, Valutazione delle guide chirurgiche per impianti stampate in 3D senza maniche metalliche, Dent. Mater. 35 (3) (2019) 468–476.
- D. Kaewsiri, S. Panmekiate, K. Subbalekha, N. Mattheos, A. Pimkhaokham, L'accuratezza della chirurgia implantare assistita da computer statica rispetto a quella dinamica in uno spazio per un singolo dente: uno studio controllato randomizzato, Clin. Oral Implants Res. 30 (6) (2019) 505–514.
- C.M. Cristache, S. Gurbanescu, Valutazione dell'accuratezza di un modello chirurgico stereolitografico per l'inserimento di impianti dentali utilizzando un protocollo di sovrapposizione 3D, Int. J. Dent. 2017 (2017) 4292081.
- P. Smitkarn, K. Subbalekha, N. Mattheos, A. Pimkhaokham, L'accuratezza degli impianti a singolo dente inseriti utilizzando chirurgia completamente guidata digitalmente e chirurgia implantare a mano libera, J. Clin. Periodontol. 46 (9) (2019) 949–957.
- A.M. Greenberg, Tecniche avanzate per l'inserimento di impianti dentali, J. Istanb. Univ. Fac. Dent. 51 (3 Suppl 1) (2017) S76–s89.
- S. Chandran K R, M. Goyal, N. Mittal, J.S. George, Accuratezza dell'inserimento immediato di impianti a mano libera rispetto a quelli guidati: uno studio controllato randomizzato, J. Dent. 136 (2023) 104620.
- H. Arora, S. Ivanovski, Risultati clinici ed estetici degli impianti a singolo dente inseriti immediatamente con restauro immediato rispetto a quello ritardato nell'arcata anteriore mascellare: uno studio retrospettivo di coorte, Clin. Oral Implants Res. 29 (3) (2018) 346–352.
- T. Cantoni, P. Giovanni, Pianificazione del trattamento implantare in siti di estrazione freschi: utilizzo di una nuova guida radiografica e tecnologia CAD/CAM, Quintessence Int. 40 (9) (2009) 773–781.
- N. Khzam, H. Arora, P. Kim, A. Fisher, N. Mattheos, S. Ivanovski, Revisione sistematica delle alterazioni dei tessuti molli e dei risultati estetici dopo l'inserimento e il restauro immediato di impianti singoli nell'arcata anteriore mascellare, J. Periodontol. 86 (12) (2015) 1321–1330.
- R. Ellis, S. Chen, H. Davies, W. Fitzgerald, J. Xu, I. Darby, Stabilità primaria e risultati di guarigione di impianti conici e dritti inseriti in siti di estrazione freschi. Uno studio preclinico in vivo, Clin. Oral Implants Res. 31 (8) (2020) 705–714.
- T. Chackartchi, G.E. Romanos, L. Parkanyi, F. Schwarz, A. Sculean, Ridurre gli errori nella chirurgia implantare guidata per ottimizzare i risultati del trattamento, Periodontol. 2000 88 (1) (2022) 64–72.
- D. Schneider, M. Sancho-Puchades, J. Mir-Marí, S. Mühlemann, R. Jung, C. Hämmerle, Uno studio clinico controllato randomizzato che confronta la pianificazione e l'inserimento implantare convenzionali e assistiti da computer in pazienti parzialmente edentuli. Parte 4: accuratezza dell'inserimento degli impianti, Int. J. Periodontics Restorative Dent. 39 (4) (2019) e111–e122.
- J. Li, P.C. Meneghetti, M. Galli, G. Mendonca, Z. Chen, H.-L. Wang, Modelli a manica aperta per chirurgia implantare assistita da computer in siti guariti o di estrazione: un confronto in vitro con un sistema guidato a manica chiusa e approccio a mano libera, Clin. Oral Implants Res. 33 (7) (2022) 757–767.
- F. Raes, T. Eccellente, C. Lenzi, M. Ortolani, G. Luongo, C. Mangano, F. Mangano, Carico funzionale immediato di impianti singoli: uno studio multicentrico con 4 anni di follow-up, J. Dent. Res. Dent. Clin. Dent. Prospects. 12 (1) (2018) 26–37.
- R. Fürhauser, D. Florescu, T. Benesch, R. Haas, G. Mailath, G. Watzek, Valutazione dei tessuti molli attorno alle corone di impianti a singolo dente: il punteggio estetico rosa, Clin. Oral Implants Res. 16 (6) (2005) 639–644.
- G. Tonellini, R. Saez Vigo, G. Novelli, Chirurgia guidata doppia nel concetto All-on-4(®): quando è necessaria l'osteotomia, Int. J. Dent. 2018 (2018) 2672549.
- S. Chandran, L. Sers, G. Picciocchi, F. Luongo, H. Lerner, M. Engelschalk, S. Omar, Chirurgia implantare guidata con R2Gate®: uno studio clinico retrospettivo multicentrico con 1 anno di follow-up, J. Dent. 127 (2022) 104349.
- M. Colombo, C. Mangano, E. Mijiritsky, M. Krebs, U. Hauschild, T. Fortin, Applicazioni cliniche ed efficacia della chirurgia implantare guidata: una revisione critica basata su studi controllati randomizzati, BMC. Oral Health 17 (1) (2017) 150.
- J. Mouhyi, M.A. Salama, F.G. Mangano, C. Mangano, B. Margiani, O. Admakin, Un nuovo sistema di chirurgia guidata con una struttura a telaio aperto senza maniche: uno studio clinico retrospettivo su 38 pazienti parzialmente edentuli con 1 anno di follow-up, BMC. Oral Health 19 (1) (2019) 253.
- Ł. Zadrożny, M. Czajkowska, M. Tallarico, Approccio guidato a obiettivo multiplo come trattamento minimamente invasivo: un rapporto di caso, J. Dent. 121 (2022) 104012.
- E. Mijiritsky, H. Ben Zaken, M. Shacham, I.C. Cinar, C. Tore, K. Nagy, S.D. Ganz, Varietà di guide chirurgiche e protocolli per la riduzione ossea prima dell'inserimento dell'impianto: una revisione narrativa, Int. J. Environ. Res. Public Health 18 (5) (2021).
- Atti del Congresso Mondiale della Società Internazionale di Odontoiatria Digitale, in: Baden Baden 2019, 19, BMC Oral Health, 2019, p. 257.
- J. Krithikadatta, V. Gopikrishna, M. Datta, Linee guida CRIS (Checklist per la segnalazione di studi in-vitro): una nota concettuale sulla necessità di linee guida standardizzate per migliorare la qualità e la trasparenza nella segnalazione di studi in-vitro nella ricerca odontoiatrica sperimentale, J. Conserv. Dent. 17 (4) (2014) 301–304.
- R.H. Putra, N. Yoda, E.R. Astuti, K. Sasaki, L'accuratezza dell'inserimento degli impianti con chirurgia guidata da computer in pazienti parzialmente edentuli e possibili fattori influenzanti: una revisione sistematica e meta-analisi, J. Prosthodont. Res. 66 (1) (2022) 29–39.
- A. Tahmaseb, V. Wu, D. Wismeijer, W. Coucke, C. Evans, L'accuratezza della chirurgia implantare assistita da computer statica: una revisione sistematica e meta-analisi, Clin. Oral Implants Res. 29 (16) (2018) 416–435. Suppl.
- S.E. Cushen, I. Turkyilmaz, Impatto dell'esperienza dell'operatore sull'accuratezza dell'inserimento degli impianti con modelli chirurgici stereolitografici: uno studio in vitro, J. Prosthet. Dent. 109 (4) (2013) 248–254.
- J. Abduo, D. Lau, Durata, deviazione e percezione dell'operatore degli inserimenti implantari assistiti da computer statici da parte di clinici inesperti, Eur. J. Dent. Educ. 26 (3) (2022) 477–487.
- S. Rothlauf, S. Pieralli, C. Wesemann, F. Burkhardt, K. Vach, F. Kernen, B.C. Spies, Influenza del software di pianificazione e del design del modello sull'accuratezza della chirurgia implantare assistita da computer statica eseguita utilizzando guide fabbricate con tecnologia di estrusione di materiale: uno studio in vitro, J. Dent. 132 (2023) 104482.
- F.A. Dulla, E. Couso-Queiruga, V. Chappuis, B. Yilmaz, S. Abou-Ayash, C. Raabe, Influenza della morfologia dell'osso alveolare e del design dei fori guida sull'accuratezza della chirurgia implantare assistita da computer statica con due macro-design di impianti: uno studio in vitro, J. Dent. 130 (2023) 104426.