
Percorso di Scorrimento con Strumento di Ricerca a Movimento Reciproco: Prestazioni e Tasso di Frattura
Traduzione automatica
L'articolo originale è scritto in lingua EN (link per leggerlo) .
Abstract
Introduzione: Questo studio ha valutato il numero di canali mesiali e distali dei molari mandibolari in cui lo strumento reciprocante R-Pilot ha raggiunto la lunghezza di lavoro (WL) durante la procedura di macro glide path. Sono stati valutati anche i tassi di frattura e deformazione. Metodi: Centocinquantasei canali radicolari di 52 denti sono stati esplorati fino alla lunghezza del forame apicale. Successivamente, lo strumento R-Pilot è stato posizionato all'orifizio del canale e attivato. Lo strumento è stato mosso utilizzando un movimento a picchiettamento e una leggera pressione apicale. Questa procedura è stata ripetuta nel tentativo di raggiungere la WL. Il tipo di frattura e/o deformazione dello strumento è stato valutato mediante microscopia elettronica a scansione, mentre le radici con strumenti fratturati sono state scansionate tramite tomografia computerizzata micro. La distribuzione percentuale delle frequenze di fratture, deformazioni e canali radicolari in cui l'R-Pilot ha raggiunto la WL è stata registrata e confrontata statisticamente utilizzando il test χ2 di Pearson con α = 5%. Risultati: Gli strumenti R-Pilot hanno raggiunto la WL in 139 canali radicolari (89,10%), e il test χ2 ha mostrato una differenza significativa tra le frequenze osservate e quelle attese (χ2 = 95,41, P = .000). Le frequenze osservate di fratture (2,56%) e deformazioni (1,92%) erano anch'esse significativamente inferiori a quelle attese (frattura: χ2 = 140,41, P = .000; deformazione: χ2 = 144,23, P = .000). Le fratture si sono verificate principalmente nelle parti apicali e curve dei canali radicolari. Conclusioni: L'R-Pilot ha raggiunto la WL nel 89,10% dei canali radicolari dei molari mandibolari con tassi di frattura e deformazione rispettivamente del 2,56% e dell'1,92%. (J Endod 2020;■:1–5.)
Il percorso di scorrimento è stato definito come una procedura clinica per espandere o creare un tunnel liscio dalla porzione coronale del canale radicolare al suo termine fisiologico prima del suo ingrandimento finale, con l'obiettivo di controllare lo stress torsionale e ridurre le probabilità di frattura degli strumenti in nichel-titanio (NiTi). I passaggi essenziali che precedono il percorso di scorrimento sono stati definiti "micro percorso di scorrimento" e comprendono sia l'esplorazione del canale che la patenza apicale (cioè, la posizione dell'uscita del forame principale); di solito vengono eseguiti con piccoli strumenti manuali in acciaio inossidabile pre-curvati e movimenti delicati di avvolgimento. Tuttavia, queste procedure preliminari possono essere impegnative e richiedere tempo nelle cliniche, specialmente quando si tratta di canali radicolari curvi e/o calcificati. Dopo che il micro percorso di scorrimento è stato completato con successo, il canale già esplorato deve ancora essere ulteriormente ingrandito, una procedura chiamata "macro percorso di scorrimento". Questo viene eseguito utilizzando strumenti manuali o strumenti NiTi meccanicamente azionati appositamente progettati; questi ultimi sono preferiti poiché sono stati associati a una riduzione del dolore post-operatorio e delle riacutizzazioni, oltre a una migliore manutenzione dell'anatomia originale del canale. D'altra parte, poiché il canale è ancora stretto, l'uso di strumenti rotanti in NiTi di piccole dimensioni, i cosiddetti cercatori di percorso, è stato segnalato come più suscettibile a fratture e imprevedibile in termini di efficacia clinica e sicurezza. Con l'obiettivo di superare questi svantaggi, sono stati proposti diversi approcci, inclusi cambiamenti nella loro lega di NiTi, design e, più recentemente, la cinematica del movimento.
Il movimento alternato ha aperto nuove prospettive per la preparazione meccanicamente attivata perché riduce il tempo di lavoro, la fatica ciclica e lo stress torsionale degli strumenti rispetto alla rotazione continua. Recentemente, è stato lanciato lo strumento R-Pilot (VDW GmbH, Monaco, Germania) per la preparazione del percorso di scorrimento macro in movimento alternato. R-Pilot è realizzato in lega NiTi M-Wire con un cono di 0,04, sezione trasversale a forma di S e una punta non tagliente con un diametro di 0,125 mm. Sebbene le sue proprietà meccaniche siano state valutate in studi precedenti, le sue prestazioni per raggiungere la lunghezza di lavoro (WL) sono ancora sconosciute. Pertanto, lo scopo del presente studio era valutare i tassi di rottura e deformazione, così come il numero di canali radicolari in cui lo strumento R-Pilot è stato in grado di raggiungere la WL dei canali mesiali e distali dei molari mandibolari durante la procedura di percorso di scorrimento macro.
Le ipotesi di lavoro di questo studio erano che gli strumenti R-Pilot raggiungessero la WL in un'alta frequenza di casi e avessero bassi tassi di rottura/deformazione.
Materiali e metodi
Stima della dimensione del campione
Basandosi su uno studio con un design sperimentale simile, la dimensione dell'effetto per l'uso del movimento reciproco per raggiungere il WL è stata determinata essere 0.296. Pertanto, utilizzando la famiglia χ2 e il test di bontà di adattamento (G*Power 3.1 per Macintosh; Heinrich Heine, Universität Düsseldorf, Du€sseldorf, Germania) con parametri aggiuntivi di errore di tipo alfa di 0.05 e potenza beta di 0.95, è stata indicata una dimensione minima del campione di 149 canali radicolari.
Selezione dei campioni
Dopo l'approvazione di questo progetto da parte del Comitato Etico locale (protocollo n. 2.985.618), un totale di 100 molari mandibolari di prima e seconda classe, estratti per motivi non correlati a questo studio, sono stati selezionati casualmente da un pool di denti, radiografati in direzioni mesiale e distale utilizzando un sensore digitale (sistema radiografico digitale Schick CDR; Dentsply Sirona, Charlotte, NC), e conservati in una soluzione di timolo allo 0.5% a 5◦C. I denti con apice aperto, riassorbimenti o fratture radicolari sono stati esclusi. I criteri di inclusione consistevano in molari mandibolari con radici moderatamente curve (10◦– 20◦), 2 canali radicolari mesiali indipendenti, dal livello dell'orifizio al suo termine apicale, e 1 o 2 canali indipendenti sulla radice distale. Successivamente, sono stati selezionati 52 molari mandibolari con 156 canali radicolari.
Preparazione del Percorso di Glide
Dopo la preparazione convenzionale dell'accesso, ogni dente è stato montato su un'apparecchiatura specifica (IM Brazil, São Paulo, SP, Brasile) che simula l'alveolo e consente il collegamento della clip metallica di un localizzatore apicale elettronico (EAL), secondo uno studio precedente. Come raccomandato dal produttore, prima dell'uso dello strumento R-Pilot, è stata eseguita una esplorazione del canale radicolare (micro glide path) con un file manuale di dimensione 25 mm .08 (C-Pilot; VDW GmbH) collegato a un EAL (Root ZX; J Morita USA Inc, Irvine, CA) applicando una pressione leggera a moderata e movimenti di avvolgimento attento lungo il canale radicolare fino a quando lo schermo dell'EAL ha mostrato il segno di lettura “0.0’’. Il WL è stato impostato come questo punto di riferimento.
Prima della procedura del macro glide path, tutti gli strumenti R-Pilot selezionati sono stati ispezionati attraverso un microscopio operativo con ingrandimento X16 per escludere strumenti con difetti critici o deformazioni, e nessuno è stato escluso. Lo strumento R-Pilot è stato quindi montato su un manipolo a contrangolo (Sirona, Bensheim, Germania) alimentato da un motore elettrico (VDW Gold; VDW GmbH), e il portafile dell'EAL è stato agganciato alla parte non attiva della lama. Dopo di che, l'R-Pilot è stato posizionato a livello dell'orifizio con lo stesso angolo di inserimento del file di esplorazione fino a quando si è sentita resistenza e si è attivato in movimento reciproco (“RECIPROC ALL” modalità). Lo strumento è stato spostato in direzione apicale utilizzando 3 movimenti di picchiettamento in entrata e uscita di circa 3 mm di ampiezza con una leggera pressione apicale, dopo di che è stato rimosso dal canale, pulito con garza imbevuta di alcol e ispezionato per fratture o deformazioni. Il canale radicolare è stato quindi irrigato con 2 mL di ipoclorito di sodio al 2,5%. Questa procedura è stata ripetuta 3 volte nel tentativo di raggiungere il WL. Dopo di che, se lo strumento non ha raggiunto il WL, questa procedura è stata interrotta.
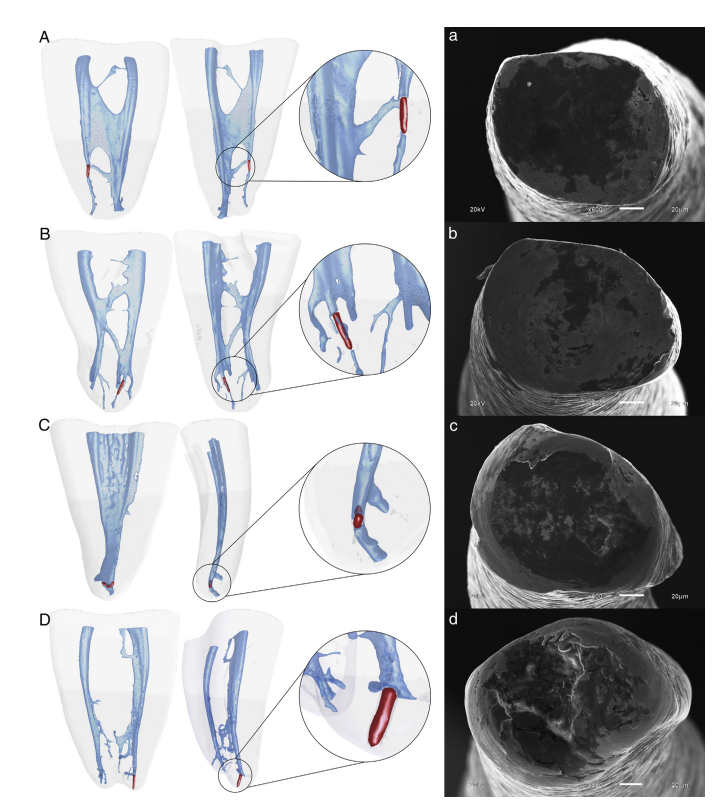
I numeri di fratture, deformazioni e canali radicolari in cui lo strumento R-Pilot ha raggiunto la WL sono stati registrati. Il tipo di frattura e/o deformazione è stato determinato a ingrandimenti da X200 a X2000 tramite un microscopio elettronico a scansione (SEM) (JEOL JSM 6510 LV; JEOL, Tokyo, Giappone) dopo che gli strumenti sono stati puliti ultrasonicamente. Inoltre, le radici con uno strumento fratturato sono state scansionate in un dispositivo di microtomografia computerizzata (micro-CT) (SkyScan 1173; Bruker microCT, Kontich, Belgio) operato a 80 kV e 100 mA, con una risoluzione isotropica di 12.82 mm, rotazione di 360◦ attorno all'asse verticale e passo di rotazione di 0.4◦ per verificare le possibili cause della frattura (Fig. 1). Un specialista in endodonzia con 5 anni di esperienza clinica ha eseguito tutte le procedure, e ogni strumento è stato utilizzato in un solo dente e scartato.
Analisi Statistica
Le distribuzioni percentuali di frequenza (%) dei campioni in cui lo strumento R-Pilot ha raggiunto e non ha raggiunto la WL sono state registrate e confrontate statisticamente utilizzando il test χ2 di Pearson. L'errore di tipo alfa e il χ2 critico sono stati impostati rispettivamente a 0.05 e 3.84, come indicato dal calcolo della potenza del campione.
Risultati
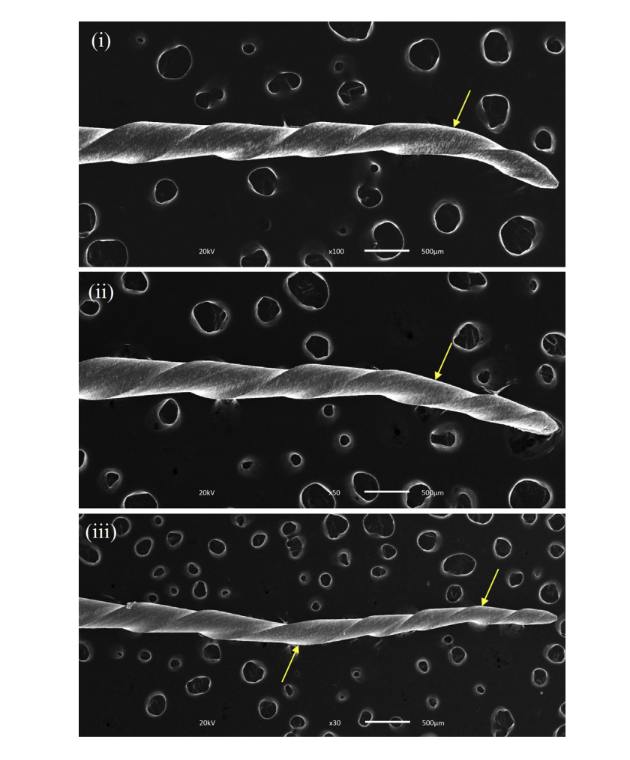
In generale, gli strumenti R-Pilot hanno raggiunto la WL in 139 canali radicolari (89,10%). Il test c2 ha mostrato che le frequenze osservate in cui l'R-Pilot ha raggiunto la WL erano significativamente diverse dalle frequenze attese (χ2 = 95,41, P = .000). Durante l'esperimento, è stata osservata una frattura in 4 strumenti (2,56%) classificati come misti (n = 3) e torsionali (n = 1) (Fig. 1), mentre 3 strumenti (1,92%) hanno mostrato deformazione della lama (Fig. 2). L'analisi del chi-quadrato ha dimostrato che le frequenze osservate di frattura e deformazione erano anch'esse significativamente inferiori a quelle attese (frattura: χ2 = 140,41, P = .000; deformazione: χ2 = 144,23, P = .000). Figura 1 mostra modelli tridimensionali (3D) acquisiti tramite scansione micro-CT delle 4 radici che rappresentano gli strumenti fratturati situati principalmente nella parte apicale della radice, con dimensioni che variano da 0,67 a 0,85 mm.
Discussione
Gli strumenti R-Pilot hanno raggiunto la WL in 139 di 156 canali radicolari mesiali e distali (89,10%) dei molari mandibolari, con una bassa percentuale di frequenza di frattura e deformazione. Pertanto, le ipotesi di lavoro di questo studio sono state confermate. I risultati attuali sono piuttosto interessanti, soprattutto se confrontati con la capacità degli strumenti di ricerca a rotazione di raggiungere il forame apicale (38,30%–68,30%). I risultati attuali possono essere spiegati da 3 motivi principali:
- la cinematica reciproca asimmetrica che mantiene la progressione apicale dello strumento riducendo lo stress torsionale,
- il design dello strumento, con un diametro della punta piccolo (0,125 mm) e un cono costante (0,04 mm), che minimizza il suo contatto con le pareti dentinali, e
- la sezione trasversale a forma di S, che fornisce un'efficace efficienza di taglio.
Durante la preparazione del percorso di scorrimento principale, lo strumento di ricerca del percorso è esposto a uno stress meccanico e può rompersi a causa di fatica torsionale o ciclica. Poiché gli strumenti di ricerca del percorso sono più flessibili a causa delle loro dimensioni ridotte, la fatica ciclica sembra essere meno rilevante rispetto allo stress torsionale come causa della rottura dello strumento. Nello studio attuale, sono stati osservati tassi di rottura (2,56%) e deformazione (1,92%) molto bassi, e l'approccio di imaging correlativo utilizzato ha permesso una comprensione qualitativa delle ragioni del fallimento dello strumento. Gli strumenti rotti sono stati valutati mediante analisi SEM, e le 4 radici con frammenti di R-Pilot sono state scansionate in un dispositivo micro-CT. L'analisi SEM ha dimostrato tipi di rottura mista in 3 strumenti e rottura torsionale in un altro strumento (Fig. 1), mentre l'analisi dei modelli 3D ha mostrato che 2 delle radici avevano canali radicolari relativamente dritti ma stretti, e la rottura si è verificata nei terzi medio (n = 1) e apicale (n = 1), mentre gli altri strumenti si sono rotti alla curvatura del canale apicale (Fig. 1). Si può presumere che l'incidenza di un singolo tipo di rottura torsionale sarebbe una conseguenza del movimento reciproco, che ha evitato in modo efficiente il fenomeno del blocco del cono che si verifica spesso sotto rotazione continua. D'altra parte, le rotture miste erano possibilmente correlate all'operatore. Avanzare questo tipo di strumento verso l'apice è piuttosto difficile, e non è insolito che un operatore aumenti la pressione su di esso, causando la sua flessione a causa del suo basso cono e del piccolo nucleo. Presi insieme, l'aumento della flessione, il bloccaggio della punta e la curvatura apicale erano possibilmente la causa delle rotture miste.
Numerosi studi hanno dimostrato l'efficacia degli EAL, dimostrando che il metodo elettronico è il modo migliore per una corretta determinazione della WL. Inoltre, il Root ZX è generalmente considerato come lo standard d'oro degli EAL. La lettura di 0.0 dell'EAL è rilevante perché mostra la determinazione del forame apicale maggiore. Pertanto, in questo studio, la lettura di 0.0 del Root ZX è stata utilizzata come punto di riferimento per valutare le prestazioni dello strumento R-Pilot.
Negli studi comparativi, è estremamente importante standardizzare il campione per evitare bias legati alla morfologia del canale radicolare. Tuttavia, l'indagine attuale non era uno studio comparativo. Pertanto, sono stati selezionati canali radicolari con curvatura moderata considerando la loro alta incidenza nei molari mandibolari e perché rappresentano una sfida clinica per eseguire procedure di glide path. Tutti i canali radicolari erano apparentemente negoziabili, poiché il scouting è stato eseguito con successo con un file manuale .08. Ciò significa che non si possono considerare sfide anatomiche significative come la causa principale degli strumenti R-Pilot che non hanno raggiunto la WL. È possibile che i detriti dentinali creati durante la gestione del glide path siano stati compressi nel canale apicale, impedendo agli strumenti di raggiungere il forame, il che sottolinea solo l'importanza dell'irrigazione del canale radicolare; tuttavia, questo deve ancora essere dimostrato in ulteriori studi.
La valutazione della frequenza percentuale con cui gli strumenti di ricerca hanno raggiunto il WL senza rottura o distorsione sembra essere il miglior metodo per classificare le loro prestazioni e sicurezza. In questo senso, la metodologia applicata a questo studio si adatta molto bene a questo scopo. È anche importante sottolineare che nello studio della frequenza di un dato evento in una popolazione, non è necessariamente richiesto un gruppo di controllo. Ad esempio, nel presente studio, una procedura statistica χ2 certifica adeguatamente la significatività delle frequenze osservate. Pertanto, la natura del presente studio non era comparativa e non era necessario alcun gruppo di riferimento poiché lo scopo principale era limitato a osservare le prestazioni degli strumenti R-Pilot, il primo strumento di ricerca a movimento reciproco lanciato sul mercato. Questo punto può essere considerato come una limitazione di questo studio, ma la grande dimensione del campione necessaria per ottenere un profilo di prestazione affidabile di un dato strumento può essere presa in considerazione. Pertanto, sono necessari ulteriori studi utilizzando il metodo proposto per valutare le prestazioni di nuovi strumenti di ricerca a movimento reciproco.
Conclusioni
In base alle condizioni del presente studio, si può concludere che gli strumenti R-Pilot hanno raggiunto la WL nel 89,10% dei canali mesiali e distali precedentemente esplorati dei molari mandibolari, con tassi di frattura e deformazione rispettivamente del 2,56% e 1,92%.
Autori: Gustavo De-Deus, Milla Lessa Cardoso, Marco Simões-Carvalho, Emmanuel J. N. L. Silva, Felipe Gonçalves Belladonna, Daniele Moreira Cavalcante, Diogo da Silva Oliveira, Erick Miranda Souza, Ricardo Tadeu Lopes, Marco Aurélio Versiani
Riferimenti:
- West JD. Il Glidepath endodontico: “segreto della sicurezza rotativa”. Dent Today 2010;29:90–3.
- Ruddle CJ, Machtou P, West D. Preparazione del canale endodontico: nuove innovazioni nella gestione del glide path e nella modellazione dei canali. Dent Today 2014;33:1–7.
- Van der Vyver PJ. Creare un glide path per strumenti rotativi in NiTi: parte uno. Int Dent J 2010;13:6–10.
- Van der Vyver PJ. ProGlider™: protocollo clinico. Endod Practice 2014;7:42–7.
- Jonker CH, Van der Vyver PJ, De Wet FA. L'influenza della preparazione del glide path sul tasso di fallimento degli strumenti reciprocanti WaveOne. SADJ 2014;69:266–9.
- Berutti E, Negro AR, Lendini M, Pasqualini D. Influenza della preflaring manuale e della coppia sul tasso di fallimento degli strumenti rotativi ProTaper. J Endod 2004;30:228–30.
- Patiño PV, Biedma BM, Li´ebana CR, et al. L'influenza di un glide path manuale sul tasso di separazione degli strumenti rotativi in NiTi. J Endod 2005;31:114–6.
- Pasqualini D, Bianchi CC, Paolino DS, et al. Valutazione micro-tomografica computata del glide path con PathFile in nichel-titanio nei canali curvi dei primi molari mascellari. J Endod 2012;38:389–93.
- Berutti E, Cantatore G, Castellucci A, et al. Uso del PathFile in nichel-titanio per creare il glide path: confronto con il preflaring manuale in canali radicolari simulati. J Endod 2009;35:408–12.
- De-Deus G, Belladonna FG, Souza EM, et al. Capacità di esplorazione di 4 strumenti di ricerca in canali molari moderatamente curvi. J Endod 2016;42:1540–4.
- Pasqualini D, Mollo L, Scotti N, et al. Dolore post-operatorio dopo glide path manuale e meccanico: uno studio clinico randomizzato. J Endod 2012;38:32–6.
- Elnaghy AM, Elsaka SE. Valutazione del trasporto del canale radicolare, del rapporto di centratura e dello spessore di dentina residua associati agli strumenti ProTaper Next con e senza glide path. J Endod 2014;40:2053–6.
- Arias A, Singh R, Peters OA. Differenze nelle prestazioni torsionali di sistemi rotativi monouso e multipli per la preparazione del glide path. Odontology 2016;104:192–8.
- Grande NM, Ahmed HM, Cohen S, et al. Valutazione attuale della reciprocità nella preparazione endodontica: una revisione completa—parte I: prospettive storiche e applicazioni attuali. J Endod 2015;41:1778–83.
- Plotino G, Ahmed HM, Grande NM, et al. Valutazione attuale della reciprocità nella preparazione endodontica: una revisione completa—parte II: proprietà ed efficacia. J Endod 2015;41:1939–50.
- Keskin C, _Inan U, Demiral M, Kelesx A. Resistenza alla fatica ciclica degli strumenti R-Pilot, WaveOne Gold Glider e ProGlider per il glide path. Clin Oral Invest 2018;22:3007–12.
- Özyürek T, Uslu G, Gündoğar M, et al. Confronto della resistenza alla fatica ciclica e delle proprietà di flessione di due file di glide path in nichel-titanio reciprocanti. Int Endod J 2018;51:1047–52.
- Topçuoğlu HS, Topçuoğlu G, Kafdağ Ö, Arslan H. Resistenza alla fatica ciclica di nuove file di glide path reciprocanti in canali curvi a 45 e 60 gradi. Int Endod J 2018;51:1053–8.
- Yılmaz K, Uslu G, Gündoğar M, et al. Resistenze alla fatica ciclica di diversi strumenti rotativi e reciprocanti in nichel-titanio a temperatura corporea. Int Endod J 2018;51:924–30.
- Santos CB, Simões-Carvalho M, Perez R, et al. Resistenza alla fatica torsionale dei sistemi reciprocanti R-Pilot e WaveOne Gold Glider in NiTi. Int Endod J 2019;52:874–9.
- Sung SY, Ha JH, Kwak SW, et al. Resistenze alla fatica torsionale e ciclica degli strumenti per la preparazione del glide path: G-file e PathFile. Scanning 2014;36:500–6.
- Gambarini G, Plotino G, Sannino GP, et al. Fatica ciclica degli strumenti per il glide path endodontico. Odontology 2015;103:56–60.
- Martins JNR, Marques D, Mata A, Carame^s J. Efficacia clinica dei localizzatori apicali elettronici: revisione sistematica. J Endod 2014;40:759–77.
- Tsesis I, Blazer T, Ben-Izhack G, et al. La precisione dei localizzatori apicali elettronici nella determinazione della lunghezza di lavoro: una revisione sistematica e meta-analisi della letteratura. J Endod 2015;41:1818–23.
- Stöber EA, Duran-Sindreu F, Mercadé M, et al. Una valutazione di Root ZX e iPex localizzatori apicali: uno studio in vivo. J Endod 2011;37:608–10.